Műholdas helymeghatározás az okoseszközökben
Hogyan működik a "GPS" vétel mobiltelefonokban, okosórákban, fitneszkarkötőkben? – írta: joghurt, 2 éve
Pontosság
A műholdas helymeghatározás működési elvéből következnek a lehetséges mérési hibák:
• A nagy besugárzott terület miatt nagyon alacsony a térerő (jelszint), hozzá képest nagy a zaj. Ez önmagában is megnehezíti a vételt. Tovább rontják a helyzetet a vízcseppek (felhő, köd), és a vizet tartalmazó levelek, ágak, mert elnyelik a műholdak jelét.
• Beépített területeken nem csak a műholdakról közvetlenül érkező jelek jutnak a vevőbe, hanem az épületekről visszavertek is. Ezek hosszabb utat tesznek meg, így a belőlük számított pozíció arrébb kerül.
• Ha valaki általában kikapcsolva tartja a telefonján a helymeghatározást („Csak ne gyűjtse a Google az adataimat!”), vagy egy zárt, fedett helyről lép ki a szabadba, eltarthat pár percig, mire a vevő összeszedi a műholdak adatait. Ilyenkor az elején még pontatlanabb a mérés – de a futás nem vár meg.
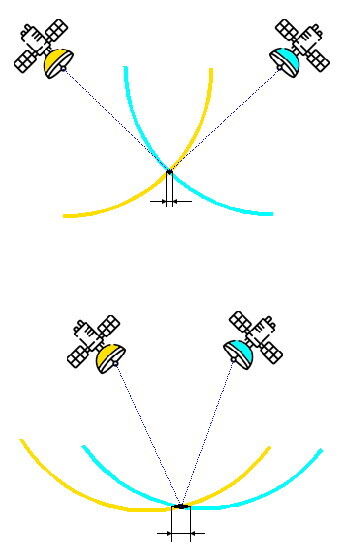
• Magának a térgeometriai számításnak is van bizonytalansága: Ha egymáshoz közeli pontokból háromszögelünk, akkor ez nagy lesz. A készülékek által kijelzett különböző DoP („a pontosság felhígulása”) értékek ezt mutatják. A vevőknek van annyi eszük, hogy az általuk látható műholdak közül azt a legalább négyet választják ki a számításhoz, amik a legnagyobb térszöget fedik le, ezáltal a numerikusan legpontosabb eredményt fogják adni.
• Ebből az is következik, hogy minél több műholdat lát egy rendszer, annál több esélye van jobb négyest találni. Ezért fontos, hogy egy mai GNSS vevő több műholdrendszert is ismerjen, és minél több csatornás legyen. GPS műholdból 8-9 van egyszerre felettünk, a négy nagy rendszerből meg összesen 30 feletti. Nagyon nem mindegy.
• Ha mi állunk is, a Föld forog, és a műholdak keringenek felettünk, és a légköri viszonyok is ingadoznak. Emiatt valószínűleg nem fog mindig ugyanaz a pozíció kijönni, még ha meg sem moccanunk. Ez egy látszólagos bolyongás, ami a valóságban megtett utunkhoz adódik. Ha pedig a vevő úgy dönt, hogy mostantól másik négy holdból fog számolni, mint eddig, szinte biztosan lesz egy kis látszólagos ugrás az eddigi pozíciónkhoz képest.
• A legfőbb bizonytalanság az elektromágneses jelek terjedési késleltetése az ionoszférában, ami folyamatosan változik.
• Aki már rögzített nyomvonalakat (többet ugyanott), annak valószínűleg ismerős a valódi útvonal körüli nyaláb. A figyelmesebbek azt is észrevehetik, hogy még ezeknek az átlaga sem feltétlenül adja ki a tényleges utat. Azért, mert a hibáknak csak egy része véletlenszerű, a többi rendszeres. Például, ha a vevő csak az égbolt egy részét látja (pl. meredek hegyoldal, magas házak), a számított helyzet tipikusan ugyanabba az irányba fog tévedni.
A GNSS vevők persze fel vannak okosítva, hogy ezeket a hibákat megpróbálják csökkenteni:
Mint minden vevőnél, az antenna itt is sokat számít. Ha pontosságot szeretnél, használj kifejezetten erre való GNSS eszközt, egy aktív (külső, égre néző) antennával!
Hagyományos méréstechnikai módszer a zajcsökkentésre a mozgó átlagolás. Ezzel simítani lehet a mért útvonalat. A vevőkben többnyire állítható a profil, hogy gyalogos / kerékpáros vagy járműves (esetleg hajós, repülős stb.) mozgást feltételezhet-e. Oldalirányban valószínűleg nem ugrálunk hirtelen egyikkel sem menet közben, bizonyos sebesség felett nem túl hihető az eredmény stb.
Ha a vevő egy készülékbe van építve (PNA, okostelefon), annak a tudását is csatarendbe állítják: például a nyers mérési pontot a bennük található térkép útjaira húzzák. Van, aki ezt utólag, kézzel teszi meg, pl. a RunKeeper alkalmazásban. Ennek nem kívánt mellékhatása, ha a pontatlanság miatt a szomszéd utcára sikerül ráhúzni, és rossz felé navigálni. Mint ahogy terepfutóknál az ösvények többnyire nincsenek meg a Google / Here / Bing térképen, ezért odacsalni sem tudják. Az OpenStreetMap alapú térképekkel (AllTrails, Mapbox, Strava, Mapy.cz, Természetjáró.hu, turistautak.hu stb. stb.) lényegesen jobb a helyzet, de itt is kérdéses, hogy az adott ösvényt milyen pontossággal mérték fel és rajzolták be.
Az okosabb (drágább) vevők az ún. L1 frekvencia mellett más sávot is kezelni tudnak (a katonai L2 vagy az újabb polgári L5). A katonaiból a kódolt pontosító adatokat természetesen nem tudják visszafejteni, azonban az is elég, hogy a különböző frekvenciákon más az ionoszférás jelterjedési idő, így több sáv mérésével ez a hiba elég jól számolható.
Az ionoszféra hatásának csökkentésére egy másik (régebbi) megközelítés, hogy egy időben két ponton mérek: egy fix, ismert pozíciójú helyen (bázis), és a terepen (rover). Ha nem vagyok túl messze a bázistól, akkor ugyanolyan jelterjedési viszonyokkal számolhatunk, azaz a fix állomáshoz képesti helyzet sokkal pontosabban lesz kiszámolható. A differenciális GPS (DGPS) módszerrel a bázistól számított 10 km-enként 5 centiméter bizonytalanság érhető el. A tengerentúlon a Parti Őrség és a földmérők voltak a módszer úttörői. (Még az ősidőkben, amikor szándékosan rontották le a GPS-ek jelét, a különbségi módszerrel az akkori 100 méteresről már akkor is 5 méter alá volt vihető a pontosság a bázisállomásokkal lefedett partokon.) Nálunk már leginkább a mezőgazdaságban terjedt el.
Ehhez részben hasonló az RTK (valós idejű kinematikus) pozíciómérés. Ez alapvetően nem a műholdak által sugárzott jelben kódolt információból szedi az adatokat, hanem magukon a digitális jeleken végez fázismérést. Itt is van egy ismert pozíciójú bázis, ami az általa látott műholdakra mért RTK korrekciós adatokat teszi közzé. Kellenek hozzá maguk a korrekciós adatok (tipikusan NTRIP formában) is. Vagy előfizet az ember csillióért egy ilyen szolgáltatásra, vagy valamelyik ingyenes castert használja magáncélra. (Ebből Magyarországon jelenleg az ország két pontján van. A bázistól távolodva itt is romlik a pontosság.) Az RTK különösen menő az önvezető járművekben és a precíziós mezőgazdaságban. Pontossága elméletileg 2 mm közelébe érhet, a gyakorlatban inkább 1-2 cm. Centiméter. Ha földmérőt látsz egy bot végére leszállt ufóval, az valószínűleg RTK mérést végez – egy-két milliónál kezdődő árú készülékkel. Lényeges hátránya, hogy a korrekciós adatok valósidejű letöltéséhez internet-elérés kell hozzá, ami a terepen tipikusan mobilnetet jelent. Ha a hegyek között nincs térerő, kb. kenhetjük az egészet a hajunkra, és visszabutulunk nagyjából egy okostelefon szintjére.
A cikk még nem ért véget, kérlek, lapozz!

Azóta történt
-
Amazfit T-Rex 2 - nem bánt
Nőtt és okosodott az Amazfit kültéri sportokra tervezett modellje, de még mindig nem ér fel a legjobbakhoz, ugyanakkor jóval olcsóbb is azoknál.
